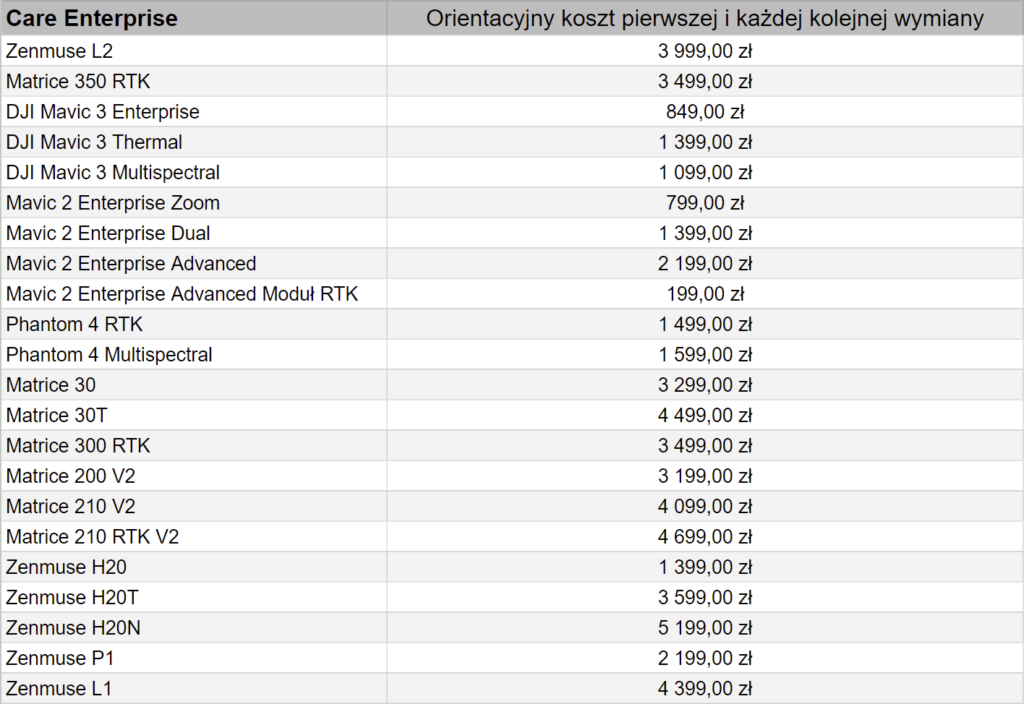
Zespół UAV GeoLab z Politechniki Warszawskiej wraz z Drony.net przeprowadził serię lotów testowych ze skanerem laserowym DJI Zenmuse L2. Loty testowe odbywały 20 września 2024 r. nad polem testowym dla systemów lidar UAV pod Warszawą. Na obszarze występują drzewa oraz niskie zabudowania i betonowe elementy pola testowego – dwuspadowe oraz prostopadłościenne. Dodatkowo w tym samym czasie przeprowadzono kilka nalotów testowych ze skanerem laserowym DJI Zenmuse L1 do celów porównawczych.
DJI Zenmuse L2: Test i porównanie z poprzednikiem
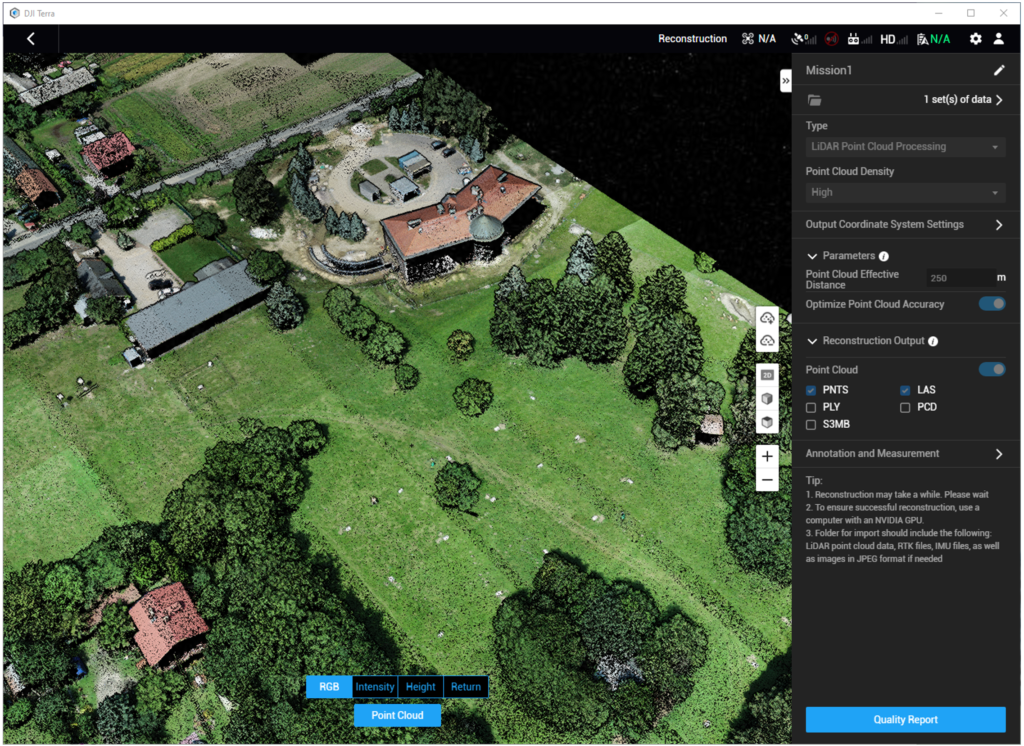
Po pozyskaniu danych w programie DJI Terra wygenerowane zostały chmury punktów. Wybrano parametry opracowania danych, a także przetestowano klasyfikację gruntu. Ponadto w oprogramowaniu DJI Terra można wyświetlać chmury według różnych atrybutów, w tym numer odbicia oraz wykonywać przekroje przez chmurę, co jest ważnym narzędziem w przypadku analiz danych ze skanowania laserowego.
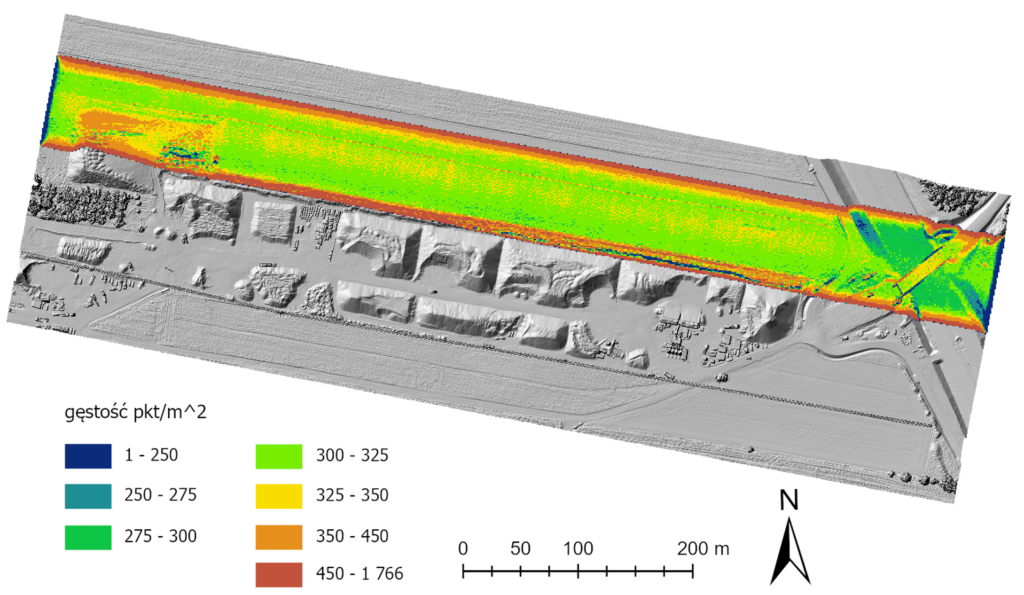
W kolejnym kroku po przetworzeniu danych z nalotów zespół przeprowadził szereg eksperymentów i analiz w oparciu o pozyskane dane i posiadane geodezyjne pomiary terenowe. Przykładowe analizy to: gęstość chmury punktów w zależności od wysokości lotu, wzoru skanowania i liczby zarejestrowanych odbić, przechodzenie wiązki przez roślinność, rozkład punktów na płaskiej powierzchni (tzw. szum w chmurze).
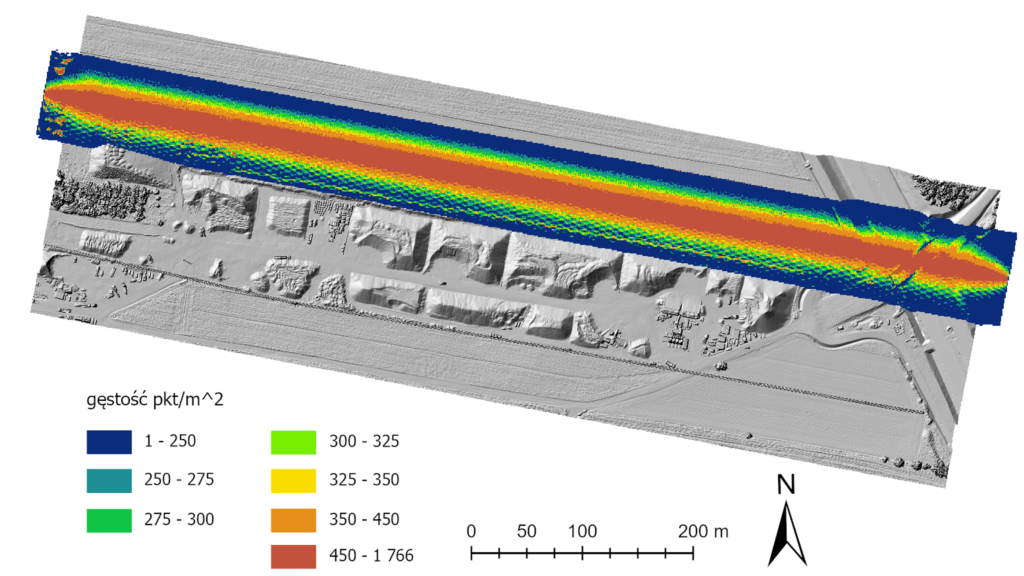
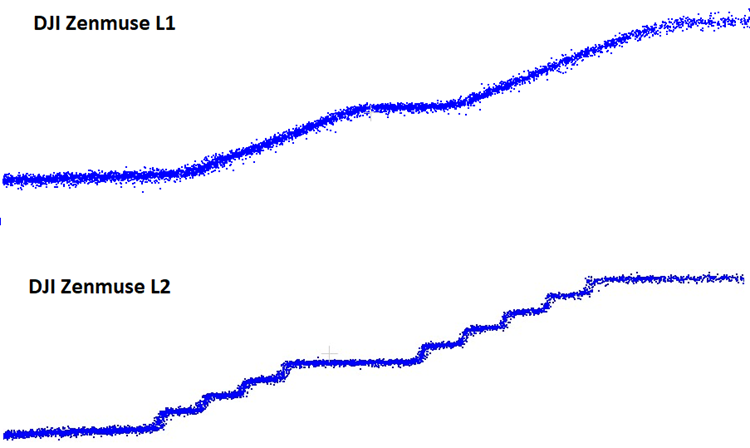
Chmura punktów charakteryzuje się innym rozkładem gęstości punktów w zależności od wyboru trybu (wzoru) skanowania. W przypadku skanowania w trybie okrągłym („kwiatek”) gęstość chmury punktów spada wraz z oddalaniem się od środka pasa skanowania. W trybie liniowym natomiast gęstość chmury jest bardziej stała w całym szeregu, na krańcach występuje wyższa gęstość chmury. Gęstość chmury punktów ze skanera L2 jest porównywalna do gęstości chmury ze skanera L1 (przy zastosowaniu takiej samej częstotliwości skanowania). W przypadku trybu skanowania repetitive (liniowy) gęstość danych z pojedynczego szeregu wyniosła ok. 400 punktów/m2, a dla trybu skanowania non-repetitive (okrągły) między 200 a 400 punktów/m2 w zależności od odległości od środka szeregu. W porównaniu ze skanerem L1, gęstość na płaskiej powierzchni nie spada wraz ze wzrostem liczby rejestrowanych odbić.
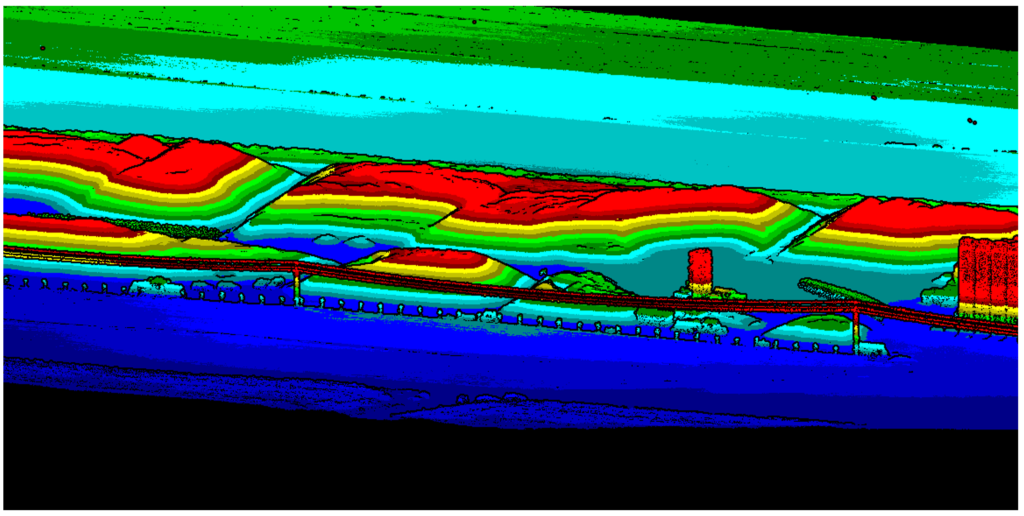
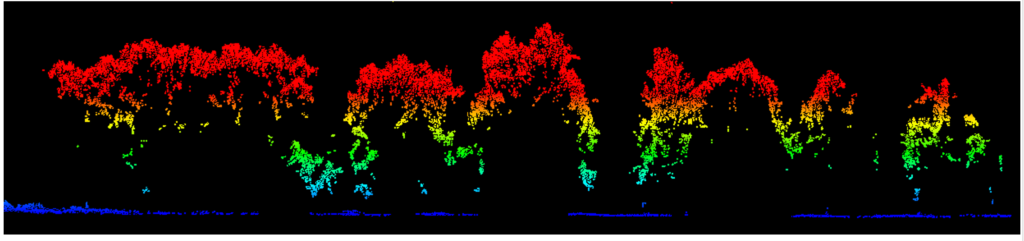
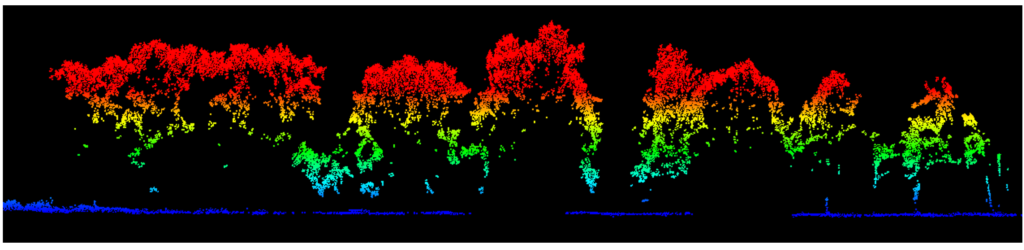
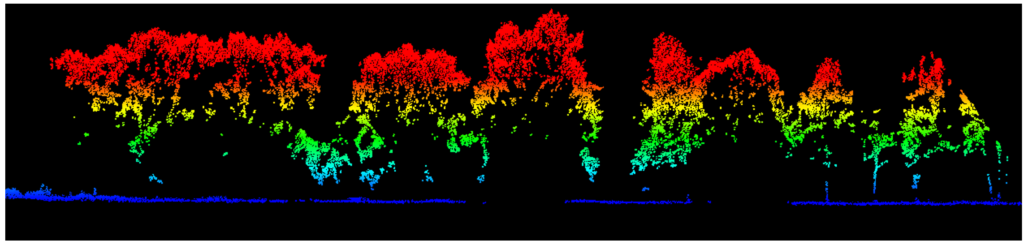
Ponadto na podstawie pozyskanych danych można było przeanalizować m.in. przechodzenie (penetrację) wiązki lasera przez drzewa w przypadku różnej liczby zarejestrowanych odbić. Skaner DJI Zenmuse L2 umożliwia pozyskanie danych aż do 5 odbić jednej wiązki lasera, czym różni się od swojego poprzednika L1 (maksymalnie 3 odbicia). W tym celu wykonano przekroje przez chmury punktów. Analizowane w kontekście penetracji wiązki chmury punktów zostały pozyskane z wysokości 60 m AGL.
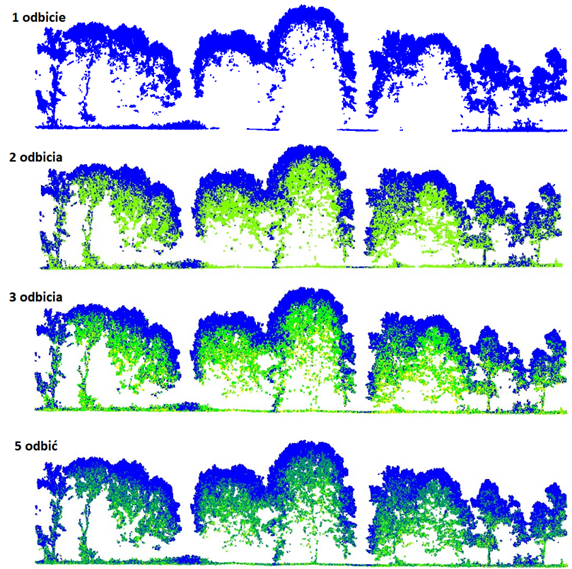
Przekroje pokazują, że im więcej odbić wiązki jest rejestrowanych, tym więcej punktów jest widocznych w dolnych partiach drzew i na gruncie. Różnica między 2 a 3 zarejestrowanymi odbiciami jest widoczna w dolnych partiach roślinności, a różnica między 3 a 5 zarejestrowanymi odbiciami jest już słabo zauważalna.
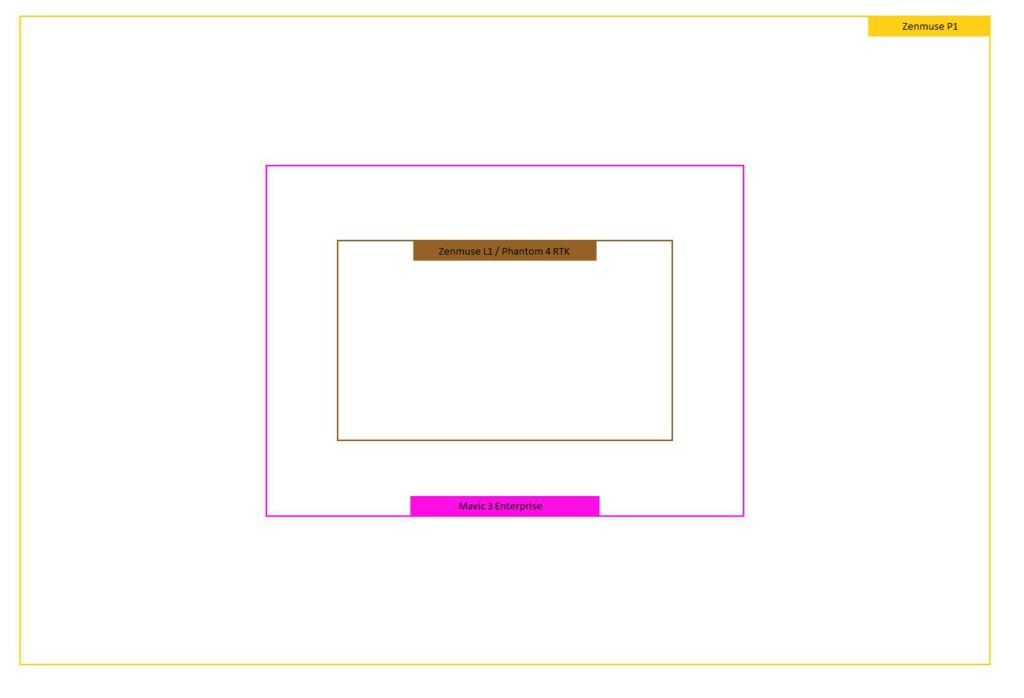
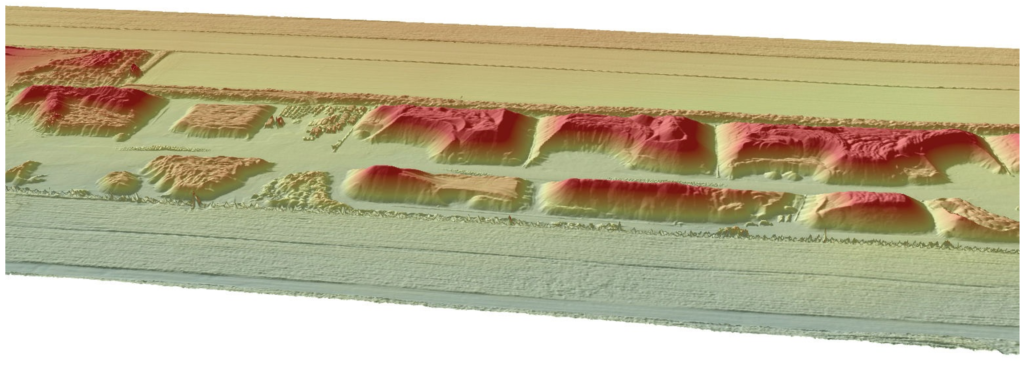
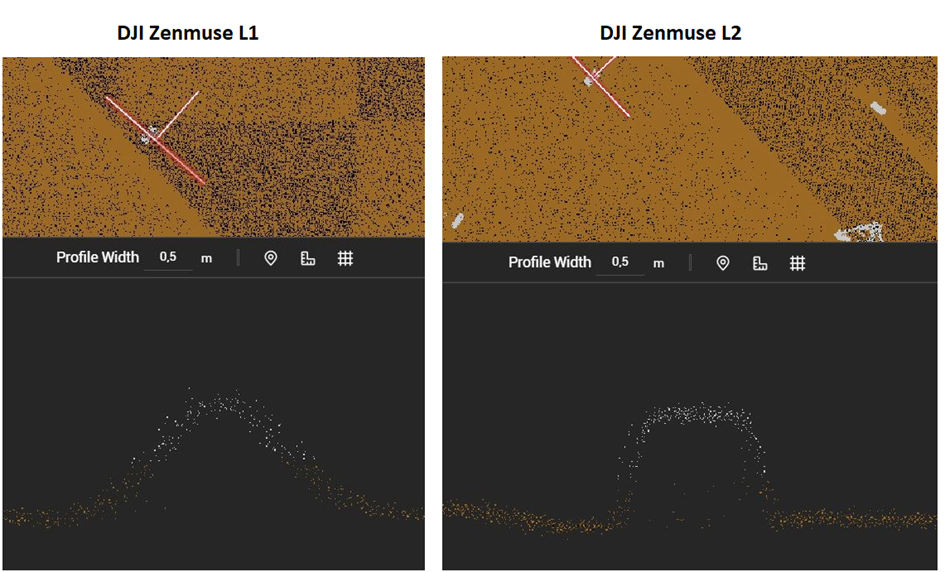
Na wybranym obszarze porównano także możliwości odwzorowania kształtu na danych ze skanera DJI Zenmuse L2. W tym celu wykonano także naloty ze skanerem L1. Do analizy kształtu wybrano schody przed budynkiem (Rys. 3) oraz betonowy, prostopadłościenny obiekt na polu testowym (Rys. 4). Wyniki analizy pokazują, że skaner L2 znacząco lepiej radzi sobie z odwzorowaniem kształtu. W przypadku schodów na chmurze ze skanera L2 można wyróżnić pojedyncze stopnie, które na chmurze ze skanera L1 nie są widoczne. W przypadku elementu betonowego, dla danych ze skanera L2 przyjmuje on rzeczywisty kształt, natomiast na danych z L1 krawędzie są wygładzone, a kształt zbliżony do dwuspadowego dachu. Lepsza rekonstrukcja kształtu na danych ze skanera L2 wynika z mniejszego rozmiaru śladu wiązki lasera (ang. Footprint) w porównaniu ze skanerem L1.
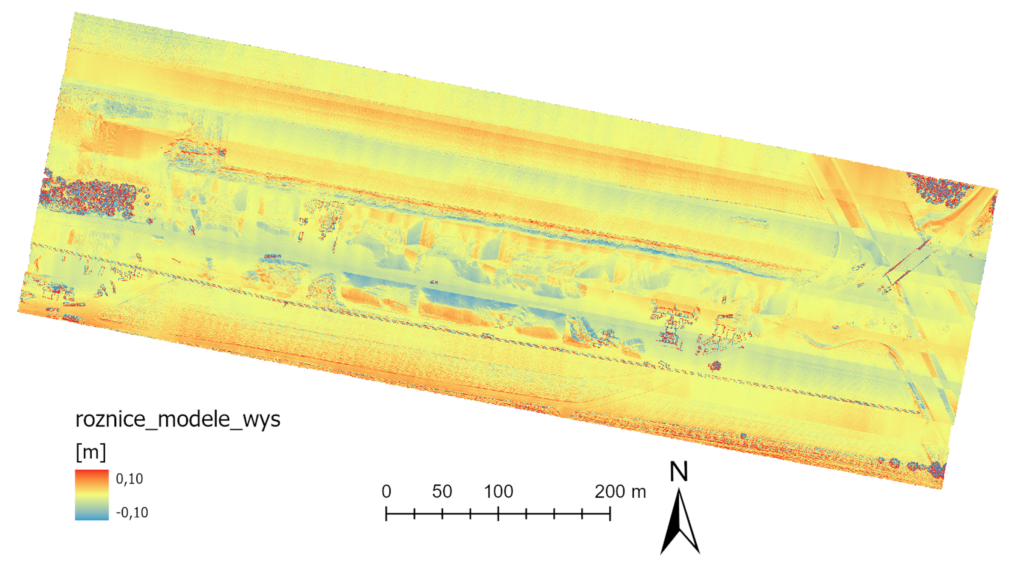
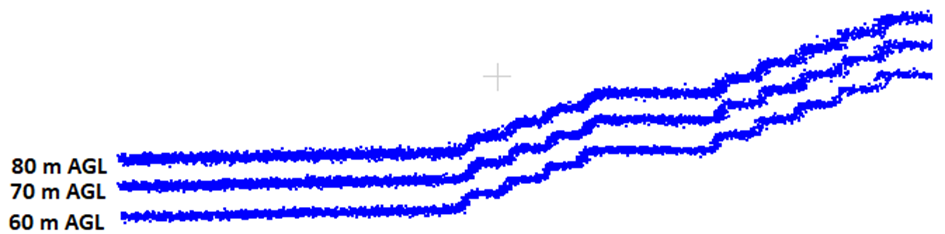
W dalszej części przeanalizowano szumy występujące w danych ze skanera DJI Zenmuse L2, czyli rozbieżność punktów na płaskiej powierzchni. W porównaniu ze skanerem L1 szumy na wysokości lotu 60 m AGL były porównywalne, lecz w przypadku skanera L2 wraz ze wzrostem wysokości nie widać dużego wzrostu zaszumienia chmury. Ponadto wraz ze wzrostem wysokości lotu można zauważyć, że jakość rekonstrukcji kształtu schodów spada, choć nadal jest ona lepsza niż w przypadku danych ze skanera L1. Wynika to głównie z mniejszego rozmiaru śladu wiązki lasera skanera L2 w porównaniu ze skanerem L1.
Podsumowanie
Gęstość chmury punktów ze skanera L2 jest porównywalna do gęstości chmury ze skanera L1 (przy zastosowaniu takiej samej częstotliwości skanowania). W przypadku trybu skanowania repetitive (liniowy) gęstość danych z pojedynczego szeregu wyniosła ok. 400 punktów/m2, a dla trybu skanowania non-repetitive (okrągły) między 200 a 400 punktów/m2 w zależności od odległości od środka szeregu. W porównaniu ze skanerem L1, gęstość na płaskiej powierzchni nie spada wraz ze wzrostem liczby rejestrowanych odbić. Uzyskane wyniki pokazały, że skaner DJI Zenmuse L2 charakteryzuje się przede wszystkim lepszą rekonstrukcją kształtów oraz mniejszym szumem w chmurze (rozbieżnością punktów na płaskiej powierzchni), co wynika z mniejszego rozmiaru śladu wiązki lasera w porównaniu ze skanerem L1.