




Produkt objęty jest dwuletnią gwarancją.
Możesz zwrócić produkt w ciągu 14 dni.

Pixhawk 2 to następca jednego z najlepszych kontrolerów lotu, opartego na otwartym oprogramowaniu i cechującego się możliwością aktualizacji. Nowy kontroler, poza funkcjonalnościami poprzednika, oferuje dodatkowo między innymi trzy niezależne moduły IMU,czy obsługę kilku systemów GPS. Pixhawk 2 może być zastosowany w bezzałogowych multicopterach, samolotach, helikopterach, łodziach, a nawet w ogólnie pojętej robotyce.
Pierwsza wersja kontrolera lotu Pixhawk, oparta na oprogramowaniu Ardupilot, była produkowana przez firmę 3DR. Kolejna wersja - Pixhawk 2 - została wykorzystana w quadrocopterze Solo tego producenta. Wszystko wskazywało na to, że wersja niezależna wyjdzie w szybkim czasie, ale do tego nie doszło, gdyż 3DR wycofało się z produkcji kontrolerów, zarówno tych pierwszej generacji, jak i Pixhawka 2. W związku z tym, na produkcję samodzielnego kontrolera zdecydowała się firma ProfiCNC, w której skład wchodzą osoby odpowiedzialne ze zaprojektowanie wersji wykorzystanej w Solo.
W zestawie:
Cechy produktu:
Specyfikacja techniczna:
Pixhawk FMU - kontroler główny
• STM32F427; flash 2MiB, RAM 256KiB.
• Wbudowana pamięć 16KiB SPI FRAM
• Żyroskop / akcelerometr MPU9250 lub ICM 20xxx.
• Barometr MS5611.
• Wszystkie sensory połączone przez SPI.
• Interfejs Micro SD przez SDIO.
Moduł IMU
• Zintegrowany akcelerometr / magnetometr LSM303D.
• Żyroskop L3GD20.
• Żyroskop / akcelerometr MPU9250 lub ICM 20xxx.
• Barometr MS5611.
• Wszystkie sensory połączone przez SPI.
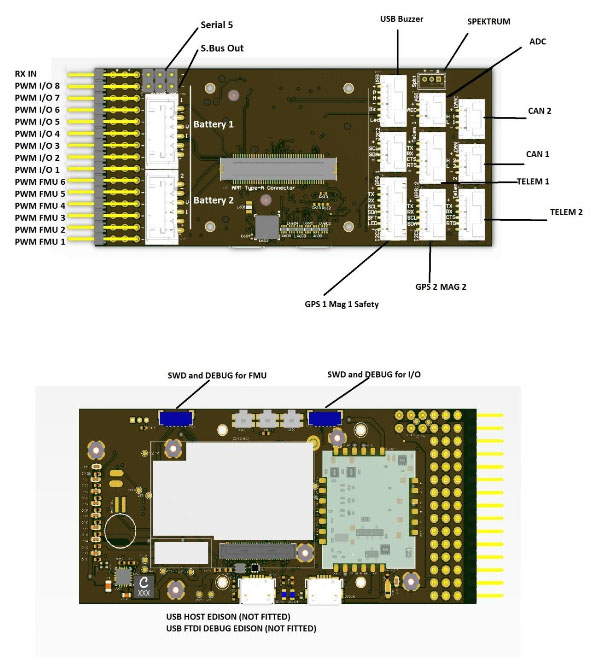
Porty
• 14 wyjść serwo PWM (8 z IO, 6 z FMU).
• Wejścia R/C dla CPPM, Spektrum / DSM i S.Bus.
• Wejście Analog / PWM RSSI.
• Wyjście serwo S.Bus.
• 5 portów szeregowych ogólnego zastosowania, 2 z pełną kontrolą przepływu, 2 porty I2C.
• Port SPI (niebuforowany, tylko dla krótkich kabli, nierekomendowany).
• 2 interfejsy CAN Bus.
• 3 wejścia analogowe.
• Sterownik brzęczyka piezoelektrycznego (na płytce rozszerzonej).
• LED RGB (kompatybilny z I2C, tylko do połączenia zewnętrznego).
• Przycisk bezpieczeństwa / LED.
Informacje o bezpieczeństwie produktu
Informacje o producencie

